Модульные роботы адаптируются к поломкам
"Румботы" - это идентичные друг другу роботы сферической формы, которые могут собираться в единую конструкцию для того, чтобы выполнять сообща конкретную задачу.
Автор: Михаил Карпов
| Раздел: Статьи |
Дата: 03 сентября 2010 года
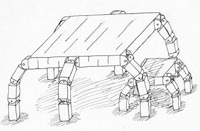
Группа европейских робототехников разработала программное обеспечение, которое позволяет модульным роботам адаптироваться к ситуациям, когда одна из их частей перестаёт работать. Дэвид Кристенсен из Университета Южной Дании в Оденсе и его коллеги из Щвейцарского государственного технологического института в Лозанне создали имитацию четвероногого робота, составленного из десятков "румботов".
Румботы
"Румботы" - это идентичные друг другу роботы сферической формы, которые могут собираться в единую конструкцию для того, чтобы выполнять сообща конкретную задачу. Интересно, что авторы исследования видят их в качестве самособирающейся, реконфигурирующейся и самочинящейся мебели - именно создание такой мебели является одной из основных целей проекта.
Авторы говорят, что модульные роботы, сделанные из простых унифицированных частей, намного надёжнее обычных. Коннекторы между модулями позволят создавать многообразие форм и изменять структуру устройства в зависимости от поставленных задач.
Помимо разработки алгоритмов, которые позволят "румботам" успешно функционировать, учёные намереваются сделать и эффективный интерфейс, чтобы пользователь мог без труда управлять роботами. Проект разрабатывается при финансовой поддержке Microsoft Research Cambridge и Федеральной политехнической школы Лозанны.
Эксперимент
В эксперименте каждый из маленьких роботов двигается случайным образом, а потом выясняет, насколько его движения сказались на скорости четырёхногого составного робота, движущегося из одной точки в другую. Через 10 минут он обнаруживает, как эффективно пользоваться ногами, и увеличивает свою скорость с 5 см/с до 31 см/с.
Когда один из "румботов" сломался и скорость сразу же снизилась до 15 см/с, четвероногий составной робот приспособился к этому новому условию. Через 20 минут он смог увеличить скорость до 21 см/с.
В принципе, это далеко не первый робот, который способен адаптироваться к неисправностям. В 2006 году Джош Бонгард из Университета Вермонта в Бурлингтоне работал над многоногим роботом, который был способен изменять своё поведение в зависимости от того, не сломана ли какая-то из его частей.
По словам Дэвида Кристинсена, одного из разработчиков модульного робота, их детище отличается от устройства Бонгарда тем, что у него нет никакого централизованного "мозга", в который заложена информация о его конструкции и параметрах окружающей среды. Модульный робот достигает тех же результатов координации движений, хотя тут задействованы автономные самообучающиеся модули.












 Vova
Vova